Gaty flex PCB-ler hakykatdanam robot we awtomatlaşdyryş programmalarynda ulanylyp bilnermi? Geliň, meselä has içgin seredeliň we mümkinçilikleri öwreneliň.
Häzirki döwürde çalt depginde ösýän dünýäde tehnologiki ösüşler pudaklary üýtgetmäge we ýaşaýyş durmuşymyzy ösdürmäge dowam edýär. Robotika we awtomatlaşdyryş, innowasiýa tehnologiýalarynyň möhüm öňe gidişliklerinden biridir. Bu sebitler görlüp-eşidilmedik ösüşi başdan geçirýär we önümçilik, saglygy goraýyş we hatda ulag ýaly dürli pudaklary özgertmegine garaşylýar. Bu innowasiýa tolkunynda, çap edilen elektron tagtalary (PCB) robot we awtomatika ösüşinde möhüm rol oýnaýan esasy komponentdir. Hususan-da, gaty çeýe PCB-ler bu pudaklary rewolýusiýa etmek mümkinçilikleri üçin ünsi özüne çekýär.

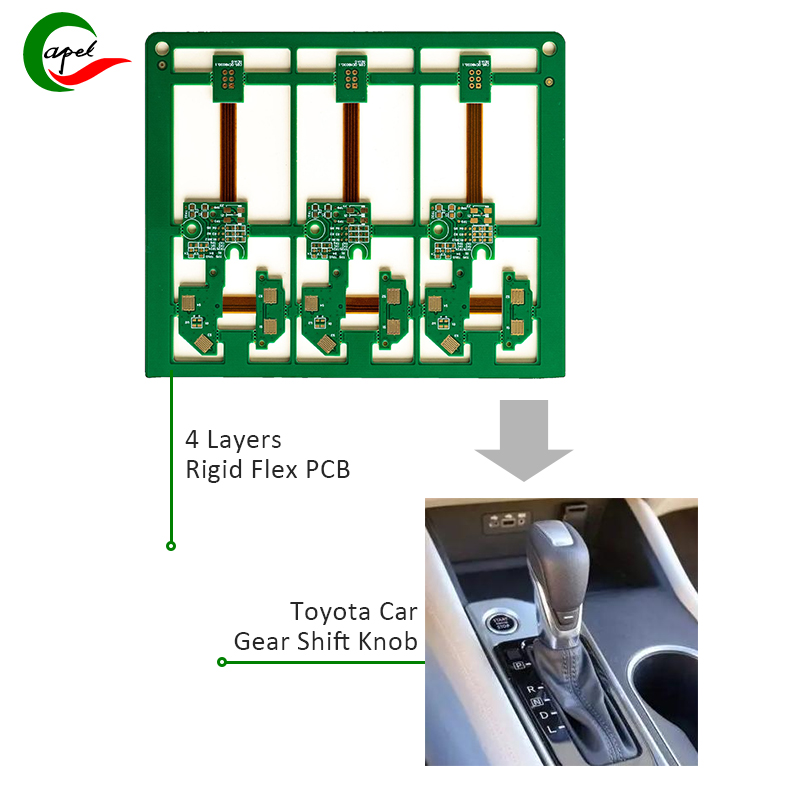
Ilki bilen, gaty flex PCB-leriň üýtgeşik aýratynlyklaryna we olaryň adaty PCB-lerden nähili tapawutlanýandyklaryna düşünmeli.Gaty flex PCB gaty we çeýe PCB komponentlerini birleşdirýän gibrid tagta. Bu kombinasiýa tagta berklik we çeýeligiň kombinasiýasyny berýär, dürli programmalaryň berkligine çydap biljekdigini we şol bir wagtyň özünde berk ýerlere sygmagy üpjün edýär. Bu dizaýn innowasiýasy, çylşyrymly zynjyrlary taslamakda we durmuşa geçirmekde, gaty flex PCB-leri robot we awtomatlaşdyrmak üçin ideal edip, deňsiz-taýsyz erkinligi üpjün edýär.
Robot we awtomatlaşdyryşda gaty flex tagtalary ulanmagyň esasy artykmaçlyklaryndan biri, ulgamyň umumy işleýşini gowulandyrmak ukybydyr.Bu tagtalaryň çeýeligi, robotyň ýa-da awtomatlaşdyryş ulgamynyň mehaniki böleklerine bökdençsiz birleşmäge, ygtybarlylygy we çydamlylygy ýokarlandyrmaga mümkinçilik berýär. Mundan başga-da, gaty flex PCB-leriň çeýeligi sebäpli birleşdirijileriň we özara baglanyşyklaryň sany azalýar, signal päsgelçiligi töwekgelçiligini azaldýar we ulgamyň umumy netijeliligini ýokarlandyrýar.
Mundan başga-da, gaty flex tagtalaryň forma faktory, olary robot we awtomatlaşdyryş amaly üçin amatly edýän başga bir faktor.Adaty berk PCB-ler kesgitlenen görnüşi bilen çäklendirilýär we köplenç dürli dizaýnlary ýerleşdirmek üçin goşmaça birikdirijileri we simleri talap edýär. Munuň tersine, gaty flex PCB-ler robot ýa-da awtomatlaşdyrylan ulgamyň içinde bar bolan giňişlige ýerleşmek arkaly bu aladany ýeňilleşdirýär. Bu dizaýn çeýeligi bilen inersenerler ýerleşişini optimizirläp we PCB-iň umumy göwrümini azaldyp, has kiçi, has ykjam robot programmalarynyň ösmegine mümkinçilik döredip bilerler.
Rigid-flex PCB integrasiýasy hem uzak möhletde çykdajylary tygşytlap biler. Az birikdirijiler we özara baglanyşyklar önümçilik we gurnama çykdajylarynyň pes bolmagyny, şeýle hem tehniki hyzmat we abatlaýyş çykdajylarynyň azdygyny aňladýar.Bu çykdajy effekti, gaty flex tagtalaryň berkligi we ygtybarlylygy bilen utgaşyp, ony robot we awtomatlaşdyryş programmalary üçin özüne çekiji görnüşe öwürýär.
Mundan başga-da, gaty flex tagtalar takyk maglumat geçirişine köp bil baglaýan robot we awtomatlaşdyryş ulgamlary üçin möhüm ähmiýete eýe bolan signal geçiriş mümkinçiliklerini üpjün edýär.Bu tagtalaryň çeýeligi, signalyň ýitirilmegini, ýoýulmagyny we pyýada ýörelgesini azaldyp, netijeli signal ugrukdyrmaga mümkinçilik berýär. Bu ulgamyň dürli bölekleriniň arasynda takyk, real wagt maglumat geçirilmegini üpjün edýär, şeýlelik bilen robot we awtomatlaşdyryş ulgamlarynyň umumy öndürijiligini we duýgurlygyny ýokarlandyrýar.
Gaty flex flexB-leriň robot we awtomatlaşdyryş programmalary üçin uly mümkinçilikleri görkezýändigine garamazdan, olaryň üstünlikli integrasiýasynyň seresaply meýilleşdirilmegini we üns berilmegini talap edýändigini bellemelidiris.Inersenerler we dizaýnerler, her bir programma mahsus bolan ýylylyk dolandyryşy, mehaniki stres we daşky gurşaw şertleri ýaly faktorlara baha bermeli. Bu faktorlar çözülmese, gaty flex tagtanyň we umumy ulgamyň öndürijiligi, ygtybarlylygy we berkligi zyýan çekip biler.
Gysgaça aýtsak, gaty çeýe PCB-leriň robot we awtomatlaşdyryş pudaklarynda öwrülişik bolmagyna garaşylýar. Çeýeligiň, çydamlylygyň we netijeliligiň özboluşly utgaşmasy olary ösen robot programmalaryny taslamak we ösdürmek üçin ideal edýär.Düzümi optimizirlemek, ululygyny azaltmak, signalyň iberilmegini ýokarlandyrmak we çykdajylary azaltmak ukyby berk flex tagtalary robot we awtomatlaşdyryşda oýun çalşyjy edýär. Tehnologiýa ösmegi bilen, robot we awtomatlaşdyryş ulgamlarynyň durmuşymyzda has möhüm rol oýnaýan geljegine ýol açyp, has tolgundyryjy we innowasion berk flex PCB programmalaryna şaýat bolup bileris.
Iş wagty: 20-2023-nji sentýabr
Yzyna




