Bu makala 4 gatly çeýe PCB tehnologiýasy we akylly süpüriji robotlarda innowasiýa ulanylyşy bilen tanyşdyrýar.4 gatly çeýe pcb ätiýaçlyk gurluşyny, zynjyryň ýerleşişini, dürli görnüşlerini, möhüm önümçilik goşundylaryny we aýratyn tehnologiki täzelikleri, şol sanda çyzygyň ini, çyzygyň aralygy, tagtanyň galyňlygy, iň az dykyzlygy, iň az dykyzlygy, mis galyňlygy, ýerüsti bejergisi, ýangyn saklaýjysy barada jikme-jik düşündiriş , garşylyk kebşirlemek we berklik we ş.m. Bu tehnologiki täzelikler akylly süpüriji robotlary dizaýn etmek we funksional taýdan kämilleşdirmek üçin köp mümkinçilikler getirdi we süpüriji robot ulgamlarynyň işleýşini, ygtybarlylygyny, çeýeligini we çeýeligini ep-esli ýokarlandyrdy.
4 gatly çeýe PCB haýsy tehnologiýa?
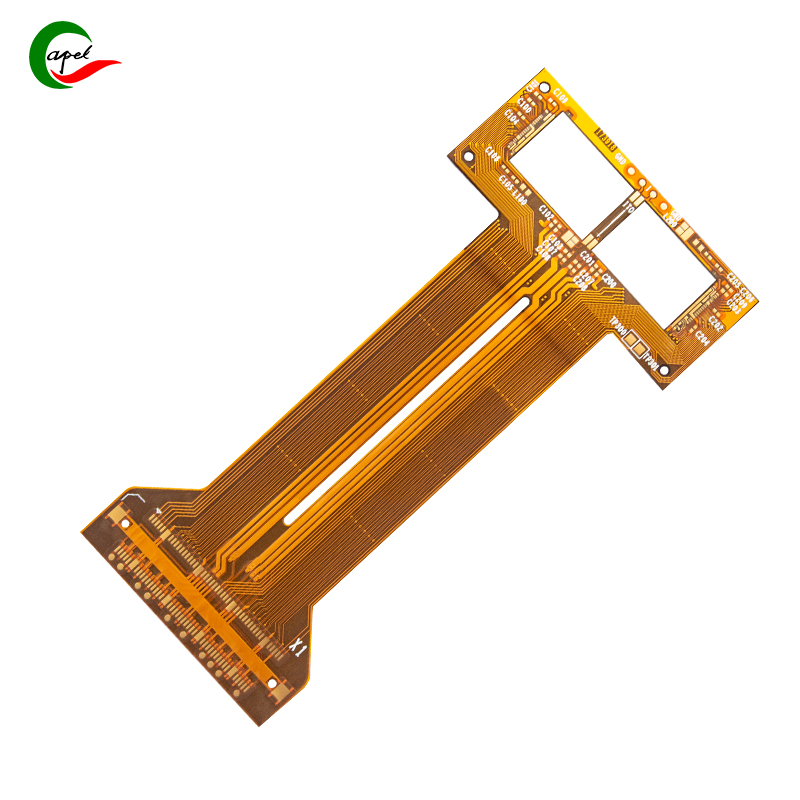
4 gatly çeýe PCB, aýlaw görnüşine meňzeş birleşdirilen dört gatlakdan ybarat ýörite zynjyr tagtasy tehnologiýasydyr.Zynjyr tagtasy örän çeýe we enjamlaryň dürli görnüşlerine uýgunlaşmak üçin egilip we bükülip bilner.Mysal üçin, käbir egri elektron enjamlarda adaty gaty zynjyr tagtalary ulanylyp bilinmez we 4 gatly çeýe PCB zerurlyklary aňsatlyk bilen kanagatlandyryp biler.Elektrik togy dürli gatlaklaryň arasynda akyp biler ýaly, izolýasiýa gatlagy zynjyry izolýasiýa edýär we gysga utgaşmalardan gaça durýar.Bu tehnologiýa, smartfonlar, lukmançylyk enjamlary we awtoulag elektronikasy ýaly dürli ugurlarda giňden ulanylýar.4 gatly çeýe PCB ulanyp, elektron enjamlary has çeýe, ýeňil we dürli çylşyrymly şertlere uýgunlaşyp biler.
4 gatly çeýe PCB-iň laminirlenen gurluşy näme?
4 gatly çeýe PCB biri-biriniň üstünde goýlan dört çeýe listden durýar.Ilki aşaky substrat, soň içki mis folga, soň içki substrat we ahyrynda ýerüsti mis folga.Bu gurluş, elektron böleklerini ýumşak substratda ýerleşdirmäge mümkinçilik berýär, şol bir wagtyň özünde zynjyr birikmeleri içki mis folga arkaly amala aşyrylýar we ýerüsti mis folga signallary we ýerleri geçirmek üçin ulanylýar.Bu gurluş dizaýny, çeýe zynjyrlary talap edýän enjamlarda ulanmak üçin amatly edip, zynjyr tagtasynyň egilmegine we öwrümine mümkinçilik berýär.Çeýe PCB-ler ykjam telefonlarda, planşetlerde, lukmançylyk enjamlarynda we beýleki ugurlarda giňden ulanylýar, bu enjamlary has ykjam we çeýe edýär, şol bir wagtyň özünde zynjyrlaryň durnuklylygyny we ygtybarlylygyny ýokarlandyrýar.
A zynjyr gatlaklaryny nädip düzmeli4 gatly çeýe PCB?
4 gatly flex PCB-iň zynjyr gatlagynyň aşaky gatlagy, içki mis folga, içki substrat we ýerüsti mis folga.Aşaky substratda içki mis folga we içki substrat yzygiderli ýerleşdirilýär, üstki mis folga bolsa içki substraty örtýär.Bu gurluş, PCB çeýe we egilip we öwrüp bilýän mahaly, zynjyr birikmelerini we signal geçirişini goldap biler.Elektron bölekleri çeýe substratda oturdylyp bilner, mis folganyň içki gatlaklary dürli gatlaklaryň arasynda zynjyrlary birleşdirmek üçin ulanylýar.Bu düzüliş, akylly bilezikler, akylly geýilýän enjamlar we ş.m. ýaly çeýeligi we miniatýurizasiýany talap edýän elektron enjamlar üçin amatlydyr. Çeýe PCB dizaýny enjamlaryň işleýşini we ygtybarlylygyny ýokarlandyryp biler we çäkli we aýratyn görnüş talaplary bolan önümler üçin amatlydyr.
4 gatly çeýe kompýuteriň haýsy görnüşleri bolup biler?
4 gatly çeýe zynjyr tagtasy bir taraply çeýe PCB, iki taraplaýyn çeýe PCB we köp gatlakly çeýe PCB ýaly dürli görnüşlere eýe bolup biler.Bir taraply çeýe PCB iň esasy görnüşdir.Bir taraply mis örtük, ýagny bir tarapdan mis folga bilen örtülmegi, ýönekeý zynjyr dizaýny we arzan çykdajy talaplary üçin amatly.Iki taraplaýyn çeýe PCB iki taraplaýyn mis örtükli, iki tarapy hem mis folga bilen örtülendir we çylşyrymly zynjyrlar we signal geçirmek üçin amatly.Köp gatlakly çeýe PCB-de has köp mis folga gatlaklary we izolýasiýa gatlaklary bar.Mundan başga-da, iki taraplaýyn mis örtük + kör gömülen deşikler bar.Bu görnüş, birikmek üçin iki taraplaýyn mis örtük esasynda kör deşik dizaýnyny goşýar.Zynjyryň içerki we daşarky gatlaklary.Iň soňky görnüşi iki taraplaýyn mis + buraw.Bu görnüş, ähli gatlaklarda zynjyrlary birikdirmek üçin ulanyp boljak iki taraplaýyn misiň üstünden deşik dizaýny goşýar.4 gatly çeýe PCB-leriň bu görnüşleriniň öz aýratynlyklary we ulanylyş gerimi bar we degişli görnüşi belli bir zynjyryň talaplaryna laýyklykda saýlap bolýar.
Esasy näme?4 gatly çeýe PCB programmalarydünýäniň esasy pudaklarynda?
Sarp ediji elektronika önümleri: smartfonlar, planşetler, geýip bolýan enjamlar we ş.m. Çeýe PCB-ler kiçi ýerlere we egri dizaýnlara uýgunlaşyp bilerler, şonuň üçin bu önümlerde giňden ulanylýar.
Lukmançylyk enjamlary: Lukmançylyk enjamlary ygtybarly elektrik birikmelerini talap edýär we käwagt egilip bilýän dizaýny talap edýär.4 gatly çeýe PCB lukmançylyk enjamlarynda giňden ulanylýar.
Awtoulag elektron ulgamlary: Häzirki zaman awtoulaglarynda çeýe PCB-ler ulagdaky elektron ulgamlar, awtoulagda güýmenje we dolandyryş ulgamlary we beýleki elektrik birikmeleri üçin ulanylýar.
Aerokosmos meýdany: Çeýe PCB ýeňil we ýokary ygtybarlylygy sebäpli dronlar, hemra we kosmos gämileri üçin elektron ulgamlaryň dizaýnynda giňden ulanylýar.
Harby we goranyş programmalary: harby aragatnaşyk enjamlary, radar ulgamlary we ş.m.
Senagat gözegçiligi we awtomatlaşdyryş: zawodyň awtomatlaşdyryş enjamlarynda, gurallarynda we ş.m.
Endokary derejeli robotlar-Capel üstünlik hadysasynyň derňewinde 4 gatly çeýe PCB-iň tehniki täzeligi

4 gatly çeýe PCB-iň çyzygynyň giňligi we çyzyk aralygy 0,1mm / 0,1mm bolup, ýokary derejeli akylly süpüriji robotlara köp tehnologiki täzelikleri getirip biler.
Ilki bilen inçe çyzyk giňligi we çyzyk aralygy bilen çeýe PCB dizaýny, robotlar üçin has çylşyrymly we has ýokary öndürijilikli elektron dolandyryş ulgamlaryny üpjün edip biler.Zynjyryň dykyzlygyny ýokarlandyrmak bilen, datçikler, prosessorlar, aragatnaşyk modullary we ş.m. ýaly has funksional modullar birleşdirilip bilner we şeýlelik bilen robotyň duýgurlygyny we karar bermek ukybyny ýokarlandyrar.
Mundan başga-da, inçe çyzyk giňligi we çyzyk aralygyndaky çeýe PCB, dolandyryş ulgamynyň göwrümini we agramyny azaltmaga kömek edip, zynjyry has ykjam edip biler.Bu, esasanam akylly süpürýän robotlar üçin möhümdir, sebäbi robotyň çeýeligini we çeýeligini gowulaşdyryp, robotyň özüne ýüküni azaldyp, batareýanyň ömrüni uzaltmaga kömek edip biler.
Dokary dykyzlykly çyzygyň ini we çyzyk aralygy dizaýny signal ibermegiň tizligini we durnuklylygyny ýokarlandyryp biler we şeýlelik bilen robotyň hakyky wagtda jogap tizligini we karar kabul etmegiň takyklygyny çaltlaşdyryp biler.Bu hereket, päsgelçiliklerden gaça durmak we karta gurluşy ýaly akylly süpürýän robotyň funksiýalary üçin örän möhümdir.
Mundan başga-da, çeýe PCB-iň materialy we gurluşy, ulanylanda robotyň titremesine we deformasiýasyna has oňat uýgunlaşyp, zynjyryň durnuklylygyny we dowamlylygyny ýokarlandyryp biler.Bu, akylly süpüriji roboty çylşyrymly iş ssenarilerine we uzak möhletli işlemäge has uýgunlaşdyrýar, şeýlelik bilen tutuş ulgamyň ygtybarlylygyny we hyzmat möhletini ýokarlandyrýar.
Tagtanyň galyňlygy 0,2 mm bolan 4 gatly çeýe PCB ýokary derejeli akylly süpüriji robotlara birnäçe tehnologiki täzelikleri getirip biler.
Ilki bilen şeýle inçe çeýe PCB dizaýny, süpürýän robotda has ykjam we ýeňil elektron dolandyryş ulgamyna ýetip biler.Inçe dizaýn, tutuş dolandyryş ulgamynyň robotyň bedenine goşulmagyny aňsatlaşdyryp, robotyň çeýeligini we hereketliligini ýokarlandyryp, zynjyr tagtasynyň galyňlygyny ep-esli azaldyp biler.
Mundan başga-da, inçe çeýe PCB-iň aýratynlyklary akylly süpüriji robotlara dinamiki şertlere we kiçi ýerlere has gowy uýgunlaşmaga mümkinçilik berýär.Onuň ajaýyp çeýeligi we berkligi elektron böleklerini hereket, egilmek we ekstruziýa ýaly amallar wagtynda robotlaryň döredýän stresine has çydamly edýär.Şonuň üçin bu dizaýn, çylşyrymly şertlerde akylly süpüriji robotlaryň durnuklylygyny we dowamlylygyny ýokarlandyrmaga kömek edýär.
Zynjyr dizaýny taýdan inçe çeýe PCB-ler has ýokary dykyzlykly simlere ýetip biler we has köp elektron böleklerini ýerleşdirip biler.Bu çäkli giňişlikde has baý we has çylşyrymly elektron dolandyryş ulgamlaryny ornaşdyrmaga mümkinçilik berýär.Mysal üçin, robotyň duýgurlygyny we karar bermek mümkinçiliklerini ýokarlandyrmak üçin has köp datçik, prosessor we aragatnaşyk modullary birleşdirilip bilner.
Mundan başga-da, inçe çeýe PCB-iň ajaýyp elektrik häsiýetleri signal beriş tizligini we durnuklylygyny ýokarlandyrmaga, akylly süpüriji robotlaryň ses tizligini we hereket takyklygyny ýokarlandyrmaga kömek edýär.Şol bir wagtyň özünde inçe çeýe PCB, tutuş ulgamyň netijeliligini we ygtybarlylygyny ýokarlandyryp, energiýa sarp edilişini we ýylylygy öndürmegi azaltmaga kömek edýär.
4 gatly çeýe PCB-iň iň az dykyzlygy 0,2 mm bolup, ýokary derejeli akylly süpüriji robotlara köp tehnologiki täzelikleri getirip biler.
Ilki bilen şeýle kiçijik deşik diametrleri ýokary dykyzlykly simleri we çeýe PCB-lerde has çylşyrymly zynjyr dizaýnlaryny üpjün edýär.Bu içerki elektron böleklerini has ykjam tertipleşdirmäge mümkinçilik berýär, şeýlelik bilen umumy ululygyny we agramyny azaldar, oturdylan akylly dolandyryş ulgamlaryny ulanmak üçin has köp mümkinçilik döreder.
Mundan başga-da, kiçijik deşik diametri bolan 4 gatly çeýe PCB hem çäkli giňişlikde has köp funksiýa we öndürijilige ýetmäge mümkinçilik berýär.Mysal üçin, has köp datçikler, prosessorlar we aragatnaşyk modullary çeýe PCB-lerde birleşdirilip bilner, akylly süpüriji robotlaryň duýgurlygyny, karar kabul etmegini we jogap tizligini ýokarlandyrmak üçin.Bu, şeýle hem robotyň lokalizasiýa funksiýasyna we awtonom nawigasiýa üçin has güýçli goldaw berýär.
Elektron birikmeler nukdaýnazaryndan kiçi deşikli 4 gatly çeýe PCB ýokary dykyzlykly kebşirlemegi we birikmegi gazanyp biler we şeýlelik bilen zynjyryň ygtybarlylygyny we durnuklylygyny ýokarlandyrar.Bu akylly süpüriji robotlar üçin aýratyn möhümdir, sebäbi hereketiň we titremäniň bardygyna garamazdan durnukly we ygtybarly baglanyşygy saklamak robotyň uzak möhletli işlemegi we berkligi üçin möhümdir.
Mundan başga-da, kiçi deşik diametri sim we komponentleri ýerleşdirmek üçin tagtanyň içinde has köp ýer aňladýar, şeýlelik bilen ulgam integrasiýasyny we umumy işleýşini gowulandyrýar.Çeýe PCB-iň aýratynlyklary, robot işleýän wagty deformasiýa we deflýasiýa has gowy uýgunlaşmaga mümkinçilik berýär, bu çylşyrymly şertlerde akylly süpüriji robotlaryň durnuklylygyny we dowamlylygyny ýokarlandyrmaga mümkinçilik berýär.
4 gatly çeýe PCB-iň mis galyňlygy 12um bolup, ýokary derejeli akylly süpüriji robotlara köp tehnologiki täzelikleri getirip biler.
Ilki bilen has inçe mis gatlagy çeýe PCB-ni has çeýe we egilýär.Diýmek, ýokary derejeli akylly süpüriji robotlarda, zynjyr tagtasynyň görnüşi we ýerleşişi has çylşyrymly we dar robot gurluşlaryna uýgunlaşmak üçin has çeýe dizaýn edilip bilner, şeýlelik bilen umumy dizaýnyň çeýeligini we uýgunlaşmagyny ýokarlandyrar.
Ikinjiden, inçe mis gatlak, ýokary derejeli akylly süpüriji robotlaryň ýeňil dizaýny üçin möhüm ähmiýete eýe bolan has ýeňil zynjyr tagtasyny aňladýar.Lighteňil dizaýn robotyň netijeliligini ýokarlandyryp, energiýa sarp etmesini azaldyp, robotyň hereketine we berkligine has köp ýer berip biler.Şonuň üçin inçe mis gatlakly çeýe PCB-ler ýokary derejeli akylly süpüriji robotlaryň dizaýny üçin has köp mümkinçilik döredip biler.
Geçiriş öndürijiligi taýdan inçe mis gatlaklary has ýokary zynjyr öndürijiligini üpjün edip biler.Zynjyr tagtasynyň mis gatlagy tok we signallary geçirmek üçin ulanylýar we has inçe mis gatlak, zynjyryň garşylygyny we signal ýitgisini azaldyp biler, şeýlelik bilen umumy öndürijiligi we netijeliligi ýokarlandyrar.Bu, sensor maglumatlarynyň takyklygyny we jogap tizligini ýokarlandyryp we robotyň akyl derejesini ýokarlandyryp bilýän akylly süpüriji robotlaryň elektron dolandyryş ulgamy üçin aýratyn möhümdir.
Mundan başga-da, inçe mis gatlaklary has inçe zynjyryň ýerleşişini we has dykyzlygyny aňladýar.Bu, has çylşyrymly we çylşyrymly zynjyr dizaýnlarynyň çeýe PCB-lerde durmuşa geçirilip bilinjekdigini, ýokary derejeli akylly süpüriji robotlaryň işleýşini giňeltmek we öndürijiligini gowulandyrmak üçin has köp ýer üpjün edýändigini aňladýar.Has datçikleriň integrasiýasyndan has güýçli prosessorlary ulanmaklyga çenli inçe mis gatlak çeýe PCB, akylly süpüriji robotlaryň tehnologiki täzelikleri üçin has giň mümkinçilikleri üpjün edýär.
Faceerüsti bejermek: 4 gatly çeýe PCB-den çümdürmek altyn, ýokary derejeli akylly süpüriji robotlara köp tehnologiki täzelikleri getirip biler.
Ilki bilen, çümdürilmek altyn ýüzüni bejermek ajaýyp elektrik häsiýetlerini we gowy lehimleme öndürijiligini üpjün edip biler.Endokary derejeli akylly süpüriji robotlar üçin bu has durnukly we ygtybarly elektrik birikmelerini aňladýar, bu umumy zynjyryň işleýşini we durnuklylygyny ýokarlandyrmaga kömek edýär.Bu, robotyň takyklygyny we ygtybarlylygyny ýokarlandyrmak üçin peýdaly datçikler, motor dolandyryşlary we aragatnaşyk modullary ýaly esasy komponentleri birikdirmek üçin örän möhümdir.
Ikinjiden, çümdüriliş altyn ýüzüni bejermek ajaýyp poslama garşylygy we uzak möhletli durnuklylygy üpjün edýär.Bu, esasanam pol arassalaýyş işleri bilen ýüzbe-ýüz bolanda, agyr şertlerde akylly süpüriji robotlaryň uzak möhletli durnukly işlemegi üçin örän möhümdir.Suwa çümdürmek Altyn ýüzüni bejermek, elektron tagtasynyň hyzmat möhletini uzaltmaga kömek edýär we tehniki hyzmat çykdajylaryny azaldýar, şeýlelik bilen ýokary derejeli akylly süpüriji robotlaryň ygtybarly we üznüksiz işlemegi üçin tehniki kepillik berýär.
Mundan başga-da, “Immersion Gold” has takyk kebşirlemegi we ýygnamagy aňsatlaşdyrýan gaty tekiz we tekiz ýer bilen üpjün edýär.Endokary derejeli akylly süpüriji robotlarda, bu elektron komponentleriniň has çeýe tertiplenip we ýygnalyp bilinjekdigini, has çylşyrymly we ykjam dizaýnlara ýetmegine we tehnologiki innowasiýa üçin giňişligiň artmagyna kömek edýändigini aňladýar.
Mundan başga-da, “Immersion Gold” ýerüsti bejergisi gowy lehimli bilelikdäki ygtybarlylygy we gowy ýylylyk geçirijiligini üpjün edýär.Bu, ýokary öndürijilikli akylly süpüriji robotlaryň elektron dolandyryş komponentleriniň durnukly işlemegi we ýylylygyň ýaýramagy üçin umumy ähmiýete we ygtybarlylygy ýokarlandyrmaga kömek edýär.
4 gatly çeýe PCB-iň Flame Retardant: 94V0 ýokary derejeli akylly süpüriji robotlara köp tehnologiki täzelikleri getirip biler.
Ilki bilen “Flame Retardant: 94V0” -iň 4 gatly çeýe PCB-ni ulanmak, akylly süpüriji robotlaryň howpsuzlygyny ep-esli ýokarlandyryp biler.Endokary derejeli akylly enjamlarda howpsuzlyk möhüm meseledir.“Flame Retardant” materialyny ulanmak, howpsuzlyk derejesiniň has ýokary bolmagyna getirip, elektrik tagtasynyň ýangyn howpuny ep-esli azaldyp biler.Akylly süpüriji robotlary ulananyňyzda gysga utgaşmalar, aşa gyzmak we beýleki kynçylyklar sebäpli dörän elektrik togunyň ýanmagynyň öňüni almak gaty möhümdir.
Ikinjiden, “Flame Retardant” materialy akylly süpürýän robotlaryň ygtybarlylygyny we durnuklylygyny ýokarlandyryp biler.“Flame Retardant: 94V0” ulanýan PCB-ler has gowy ýylylyga garşylykly we has ýokary temperatura gurşawyna zeper ýetmezden çydap bilýärler, bu bolsa akylly süpüriji robotlaryň has agyr iş şertlerine, şol sanda ýokary temperatura şertlerinde arassalaýyş meselelerine ýa-da uzak möhletleýin talaplara çydap biljekdigini aňladýar.Bu, hyzmat möhletini uzaltmak bilen akylly süpürýän robotyň durnuklylygyny we ygtybarlylygyny ýokarlandyrmaga kömek edýär.
Mundan başga-da, “Flame Retardant” materiallary köplenç dartyş güýji, çeýeligi we beýleki häsiýetlerini goşmak bilen has gowy mehaniki häsiýetlere eýe.Bu, “Flame Retardant: 94V0” ulanýan çeýe PCB-leriň yrgyldy we zarba ýaly daşky gurşaw faktorlaryna has oňat çemeleşip biljekdigini, zynjyr tagtalarynyň zaýalanmagyny we döwülmegini azaltmaga kömek edip, şeýlelik bilen hakyky ulanylýan akylly süpüriji robotlaryň durnuklylygyny we ygtybarlylygyny ýokarlandyrjakdygyny aňladýar..
Şol bir wagtyň özünde, “Flame Retardant: 94V0” -iň 4 gatly çeýe PCB-si, şeýle hem has çylşyrymly we ykjam zynjyryň ýerleşişini we dizaýnyny amala aşyryp bilýän, akylly süpüriji robotlaryň umumy öndürijiligini we funksional täzeligini ýokarlandyrmaga kömek edip biljek gowy işleýiş ýerine ýetirijiligine we plastisitine eýe.
Garşylyk kebşirleýiş reňki: 4 gatly çeýe PCB-den gara, ýokary derejeli akylly süpüriji robotlara birnäçe tehnologiki täzelikleri getirip biler.
Ilki bilen, garşylyk kebşirleýiş reňkini ulanyp, 4 gatly çeýe PCB: Gara has ýokary elektrik birikmesini we durnuklylygy üpjün edip biler.Garşylyk kebşirleýiş tehnologiýasy, zynjyr tagtasyndaky has berk birikme nokatlaryny we has ygtybarly elektrik signalynyň berilmegini üpjün edýär.Smartokary derejeli akylly süpüriji robotlar üçin datçikleriň, herekete getirijileriň we dolandyryş bölümleriniň ygtybarlylygy üçin durnukly elektrik birikmeleri möhümdir.Bu, akylly süpüriji robotlaryň ýerleşiş takyklygynyň, herekete gözegçilik we datçigiň sesleniş takyklygynyň gowulaşyp biljekdigini aňladýar.
Ikinjiden, garşylyk kebşirleýiş reňki: Gara tehnologiýa ýylylygyň ýaýramagynyň has gowy öndürijiligini üpjün edip biler.Endokary derejeli akylly süpüriji robotlarda ýokary komponentler we datçikler dykyz ýerleşdirilip, ýokary ýylylygyň ýaýramagyny talap edýär.Garşylyk kebşirleýiş reňki: Gara 4 gatly çeýe PCB ulanyp, gyzgyn tagtanyň ýygnanmagyny azaltmaga we umumy ulgamyň ýylylyk ýaýramagynyň netijeliligini ýokarlandyrmaga kömek edip, öndürijiligiň peselmeginden ýa-da aşa gyzmagy sebäpli zeper ýetmeginiň öňüni alyp, zynjyryň tagtasynyň ýylylyk geçirijiligini gowulandyryp bolar.
Mundan başga-da, garşylyk kebşirleme reňki: Gara has ýokary poslama garşy öndürijiligi üpjün edip biler.Akylly süpüriji robotlar köplenç çygly, ýokary temperaturaly ýa-da himiki taýdan poslaýjy şertlerde işlemeli, bu bolsa elektron tagtalarynyň durnuklylygyna we ygtybarlylygyna kynçylyk döredýär.Garşylyk kebşirleýiş reňkini ulanyp, 4 gatly çeýe PCB: Gara, elektron tagtasynyň poslama garşylygyny ýokarlandyryp, hyzmat möhletini uzaldyp biler we akylly süpüriji robotyň dürli kyn şertlere uýgunlaşmak ukybyny ýokarlandyryp biler.
4 gatly çeýe PCB-iň berkligi: Polat list we FR4 ýokary derejeli akylly süpüriji robotlara köp tehnologiki täzelikleri getirip, öndürijiligini we işleýşini gowulaşdyryp biler.
Gowulaşan gurluş berkligi we çeýeligi: Gatylygy birleşdirýän 4 gatly çeýe PCB: Polat list we FR4 has çeýeligi bilen belli bir gurluş berkligini saklap biler.Diýmek, ýokary derejeli akylly süpüriji robotlaryň dizaýnynda, robotyň umumy gurluşynyň dizaýn zerurlyklaryna has oňat uýgunlaşmak we çylşyrymly şertlerde robotyň işleýşini we ulanylyşyny gowulandyrmak üçin elektron bölekleriniň ýagdaýy has çeýe tertipleşdirilip bilner.
Agramy we göwrümi optimizasiýa: Adaty gaty PCB-ler bilen deňeşdirilende, çeýe PCB-ler kosmos çäklendirmelerine has gowy uýgunlaşyp bilerler, şeýlelik bilen robotyň umumy agramyny we ululygyny azaltmaga kömek eder.Diýmek, ýokary derejeli akylly süpüriji robotlar has ýeňil we ykjam bolup, göterijiligi we işleýiş amatlylygyny ýokarlandyrýar.
Gowulaşan çydamlylyk we durnuklylyk: Gatylyk: Polat list we FR4 maddy kombinasiýasyny ulanmak bilen, 4 gatly çeýe PCB has ýokary mehaniki güýje eýe bolup, aşaga garşylyk görkezip biler, şeýlelik bilen mehaniki yrgyldy we zynjyryň täsirini azaldar.Diýmek, ýokary derejeli akylly süpüriji robotlar has durnukly we çydamly bolup, abatlamak we çalyşmak zerurlygyny azaldyp, umumy ygtybarlylygy ýokarlandyryp biler.
Geçirişiň optimizasiýasy we daşky gurşawa garşylyk görkezijisi: Polat list bilen FR4, 4 gatly çeýe PCB birleşdirilende, gowy geçiriş öndürijiligi we daşky gurşawa uýgunlaşmagy bolup biler.Bu, robotyň çylşyrymly şertlerde signal berişiniň has ygtybarlydygyny we zynjyryň has durnuklydygyny aňladýar, bu robotyň akyl duýgusyny we özbaşdak işleýiş mümkinçiliklerini ýokarlandyrmaga kömek edýär.
Temperatureokary temperatura päsgelçilige garşy aýratynlyklar: FR4 materialy ýokary temperatura aýratynlyklaryna we päsgelçiliklere garşy öndürijiligine eýedir, bu arassalaýjy robotyň ýokary ýük we ýokary temperatura gurşawynda durnukly we ygtybarly işlemegini üpjün edip, umumy ygtybarlylygy we howpsuzlygy ýokarlandyrýar. .
4 gatlak çeýe PCB prototip görnüşi we önümçilik prosesi
Gysgaça mazmun
Endokary derejeli akylly süpüriji robotlar ulgamynda 4 gatly çeýe PCB tehnologiýasynyň innowasion goşundylary çyzygyň giňligini, çyzygyň aralygy, tagtanyň galyňlygy, iň az dykyzlygy, iň az dykyzlygy, mis galyňlygy, ýerüsti bejergisi, ýangyn saklaýjy, garşylyk kebşirlemesi we berkligi öz içine alýar.Bu innowasiýa tehnologiýalary, akylly süpüriji robotlaryň çeýeligini, çeýeligini, öndürijiliginiň durnuklylygyny we datçigiň sesleniş takyklygyny ýokarlandyrýar, ýokary temperatura, yrgyldy we ýokary netijelilik nukdaýnazaryndan akylly süpüriji robot ulgamlarynyň aýratyn zerurlyklaryny kanagatlandyrýar we robotyň ösüşine uly peýdalar getirýär. .
Iş wagty: Mart-09-2024
Yzyna




